Jim Fan
Jim Fan
Home
Featured
Media
Publications
Experience
Contact
Light
Dark
Automatic
Systems
MineDojo
✨
NeurIPS Outstanding Paper Award✨
. Large-scale open-ended agent learning framework in Minecraft.
Website
Paper
Code
Database
Doc
Blog
Announcement
Intro
MineDojo: Building Open-Ended Embodied Agents with Internet-Scale Knowledge
💫✨
Outstanding Paper Award
✨💫.
Neural Information Processing Systems (NeurIPS) Dataset & Benchmark, 2022
Linxi "Jim" Fan
,
Guanzhi Wang
,
Yunfan Jiang
,
Ajay Mandlekar
,
Yuncong Yang
,
Haoyi Zhu
,
Andrew Tang
,
De-An Huang
,
Yuke Zhu
,
Anima Anandkumar
Cite
Project
PDF
Arxiv
Twitter
NeurIPS 2022
Code
Models
Database
Blog
TwoMinutePaper Video
NeurIPS Interview
MIT Tech Review
Ars Technica
Training and Deploying Visual Agents at Scale
My Stanford Ph.D. thesis advised by
Fei-Fei Li
.
Learn the rules like a pro, so you can break them like an artist — Picasso
.
Sep 27, 2021
PDF
SECANT
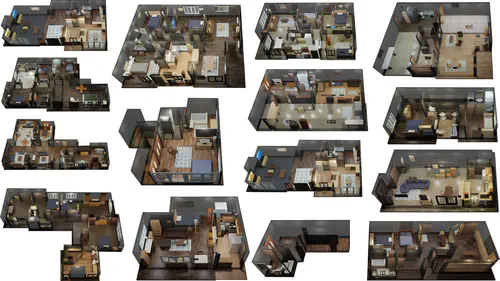
iGibson
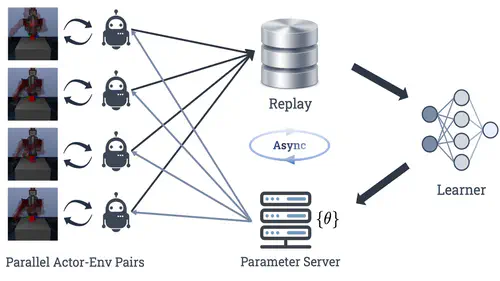
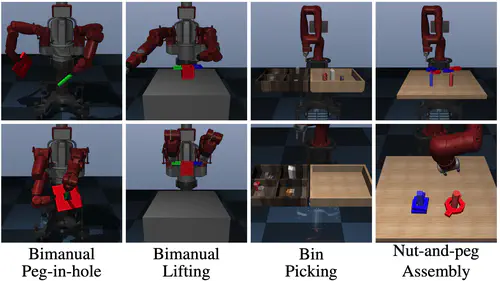
SURREAL
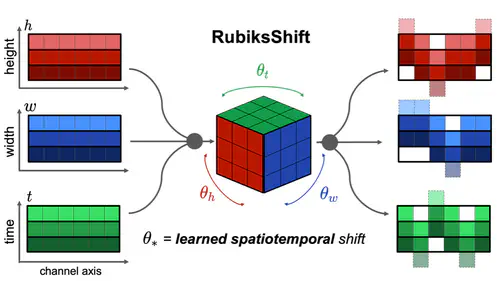
RubiksNet
Training and Deploying Visual Agents at Scale
My Stanford Ph.D. Thesis advised by Prof. Fei-Fei Li. 132 pages in total, enjoy!
Linxi "Jim" Fan
Cite
PDF
Stanford Library
iGibson 1.0: A Simulation Environment for Interactive Tasks in Large Realistic Scenes
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
Bokui Shen
,
Fei Xia
,
Chengshu Li
,
Roberto Martín-Martín
,
Linxi "Jim" Fan
,
Guanzhi Wang
,
Claudia Pérez-D'Arpino
,
Shyamal Buch
,
Sanjana Srivastava
,
Lyne P. Tchapmi
,
Micael E. Tchapmi
,
Kent Vainio
,
Josiah Wong
,
Li Fei-Fei
,
Silvio Savarese
Cite
Project
PDF
Arxiv
IROS 2021
Code
RubiksNet: Learnable 3D-Shift for Efficient Video Action Recognition
European Conference on Computer Vision (ECCV), 2020
Linxi "Jim" Fan
,
Shyamal Buch
,
Guanzhi Wang
,
Ryan Cao
,
Yuke Zhu
,
Juan Carlos Niebles
,
Li Fei-Fei
Cite
Project
PDF
ECCV 2020
Code
Video
SURREAL-System: Fully-Integrated Stack for Distributed Deep Reinforcement Learning
Whitepaper for SURREAL Distributed RL Framework
Linxi "Jim" Fan
,
Yuke Zhu
,
Jiren Zhu
,
Orien Zeng
,
Anchit Gupta
,
Joan Creus-Costa
,
Silvio Savarese
,
Li Fei-Fei
Cite
Project
PDF
Arxiv
Code
Video
SURREAL: Open-Source Reinforcement Learning Framework and Robot Manipulation Benchmark
Conference on Robot Learning (CoRL), 2018
Linxi "Jim" Fan
,
Yuke Zhu
,
Jiren Zhu
,
Orien Zeng
,
Anchit Gupta
,
Joan Creus-Costa
,
Silvio Savarese
,
Li Fei-Fei
Cite
Project
PDF
CoRL 2018
Code
Video
Stanford News
Deep Speech 2 : End-to-End Speech Recognition in English and Mandarin
International Conference on Machine Learning (ICML), 2016
Baidu Silicon Valley AI Lab
Cite
PDF
Arxiv
ICML 2016
MIT Tech Review
TechCrunch
Forbes
NPR
VentureBeat
Mashable
Cite
×