Jim Fan
Jim Fan
Home
Featured
Media
Publications
Experience
Contact
Light
Dark
Automatic
Robotics
Eureka
GPT-4 writes reward functions to teach a 5-finger robot hand how to do extremely dexterous tasks like pen spinning.
Website
Paper
Code
Announcement
Top 10 NVIDIA Projects of 2023
VIMA
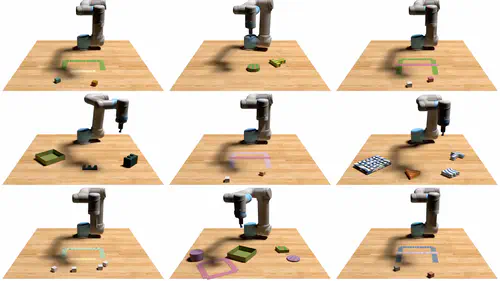
Multimodal LLM for robot manipulation; unifies diverse robotics tasks in a single prompting framework.
Website
Paper
Code
Dataset
Announcement
VIMA: General Robot Manipulation with Multimodal Prompts
✨
Oral Presentation
✨.
1st NeurIPS Workshop on Foundation Models for Decision Making (FMDM), 2022
Yunfan Jiang
,
Agrim Gupta
,
Zichen Zhang
,
Guanzhi Wang
,
Yongqiang Dou
,
Yanjun Chen
,
Li Fei-Fei
,
Anima Anandkumar
,
Yuke Zhu
,
Linxi "Jim" Fan
Cite
Project
PDF
Arxiv
Twitter
FMDM Workshop
Code
Models
Benchmark
Dataset
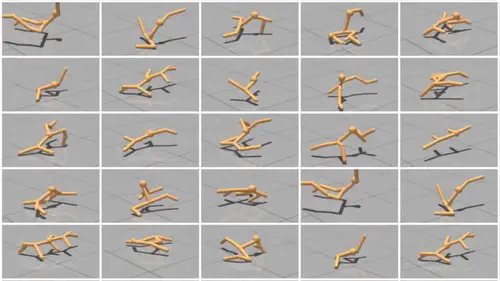
MetaMorph
Learning universal controller over diverse morphologies with transformers
Mar 22, 2022
Website
Arxiv
ICLR 2022
Code
Video
MetaMorph: Learning Universal Controllers with Transformers
International Conference on Learning Representations (ICLR), 2022
Agrim Gupta
,
Linxi "Jim" Fan
,
Surya Ganguli
,
Li Fei-Fei
Cite
Project
PDF
Arxiv
ICLR 2022
Code
Video
Training and Deploying Visual Agents at Scale
My Stanford Ph.D. Thesis advised by Prof. Fei-Fei Li. 132 pages in total, enjoy!
Linxi "Jim" Fan
Cite
PDF
Stanford Library
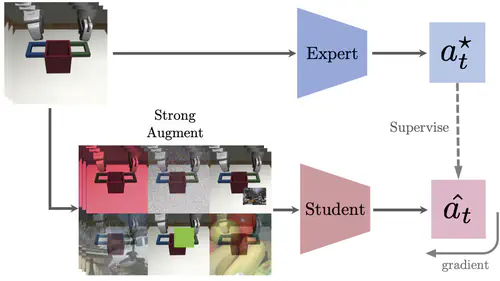
SECANT: Self-Expert Cloning for Zero-Shot Generalization of Visual Policies
International Conference on Machine Learning (ICML), 2021
Linxi "Jim" Fan
,
Guanzhi Wang
,
De-An Huang
,
Zhiding Yu
,
Li Fei-Fei
,
Yuke Zhu
,
Anima Anandkumar
Cite
Project
PDF
Arxiv
ICML 2021
Code
Video
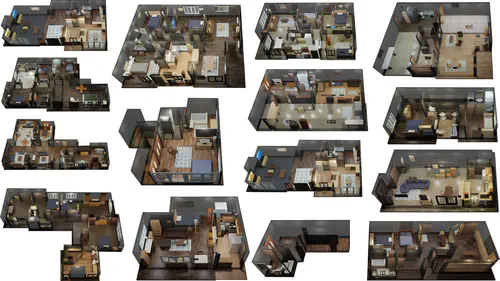
iGibson 1.0: A Simulation Environment for Interactive Tasks in Large Realistic Scenes
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
Bokui Shen
,
Fei Xia
,
Chengshu Li
,
Roberto Martín-Martín
,
Linxi "Jim" Fan
,
Guanzhi Wang
,
Claudia Pérez-D'Arpino
,
Shyamal Buch
,
Sanjana Srivastava
,
Lyne P. Tchapmi
,
Micael E. Tchapmi
,
Kent Vainio
,
Josiah Wong
,
Li Fei-Fei
,
Silvio Savarese
Cite
Project
PDF
Arxiv
IROS 2021
Code
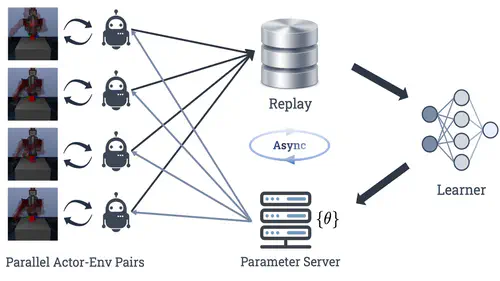
SURREAL-System: Fully-Integrated Stack for Distributed Deep Reinforcement Learning
Whitepaper for SURREAL Distributed RL Framework
Linxi "Jim" Fan
,
Yuke Zhu
,
Jiren Zhu
,
Orien Zeng
,
Anchit Gupta
,
Joan Creus-Costa
,
Silvio Savarese
,
Li Fei-Fei
Cite
Project
PDF
Arxiv
Code
Video
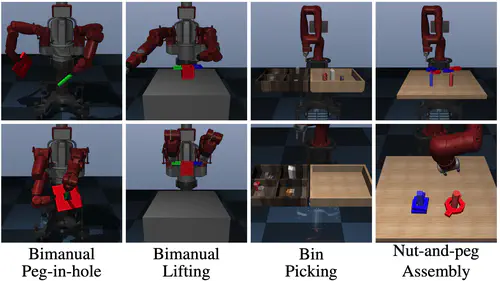
SURREAL: Open-Source Reinforcement Learning Framework and Robot Manipulation Benchmark
Conference on Robot Learning (CoRL), 2018
Linxi "Jim" Fan
,
Yuke Zhu
,
Jiren Zhu
,
Orien Zeng
,
Anchit Gupta
,
Joan Creus-Costa
,
Silvio Savarese
,
Li Fei-Fei
Cite
Project
PDF
CoRL 2018
Code
Video
Stanford News
Cite
×